
原標題:【教程】手把手教你,讓你的模型動起來
認真學習本教程,可以讓你的高達動起來。 配合先前發布的兩篇教程:
高達模型就可以上戰場了!
代碼部分為代碼下方配圖中的代碼,請注意區分。

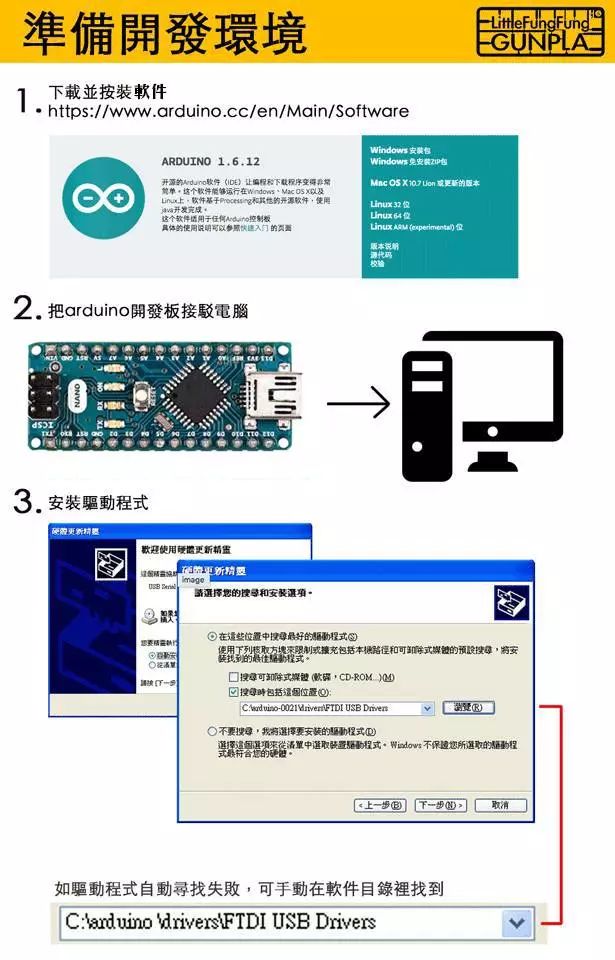
軟件下載:在圖中已寫
鵲匕
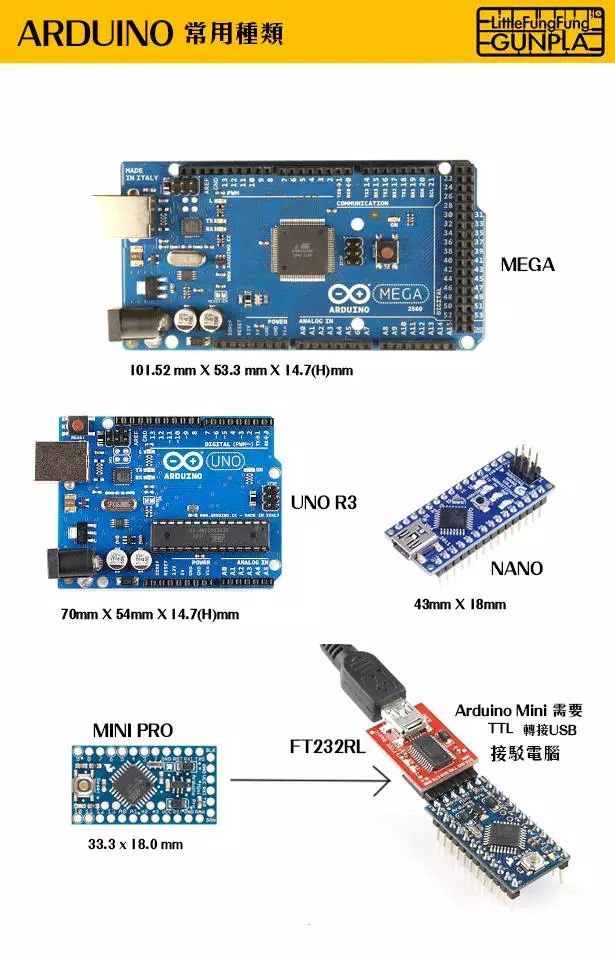
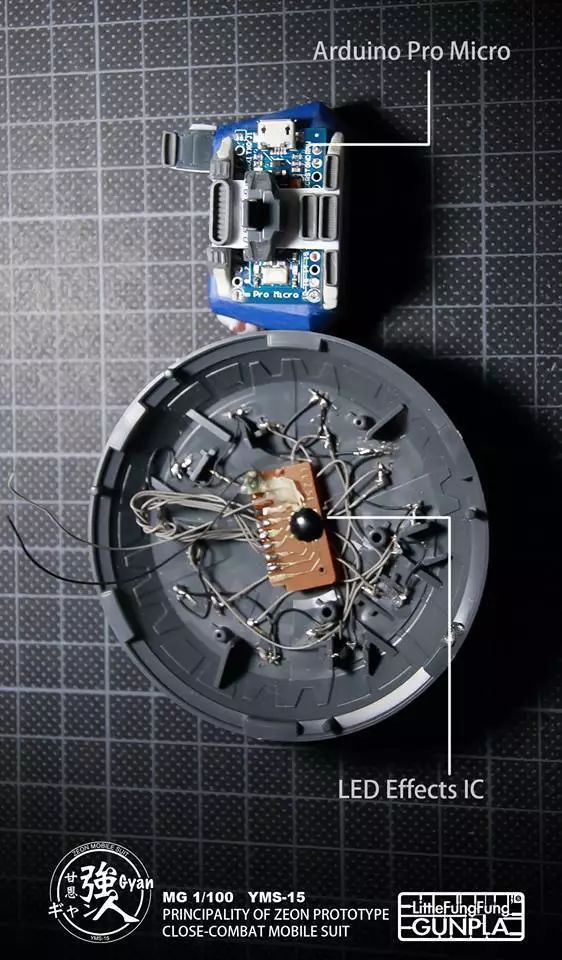
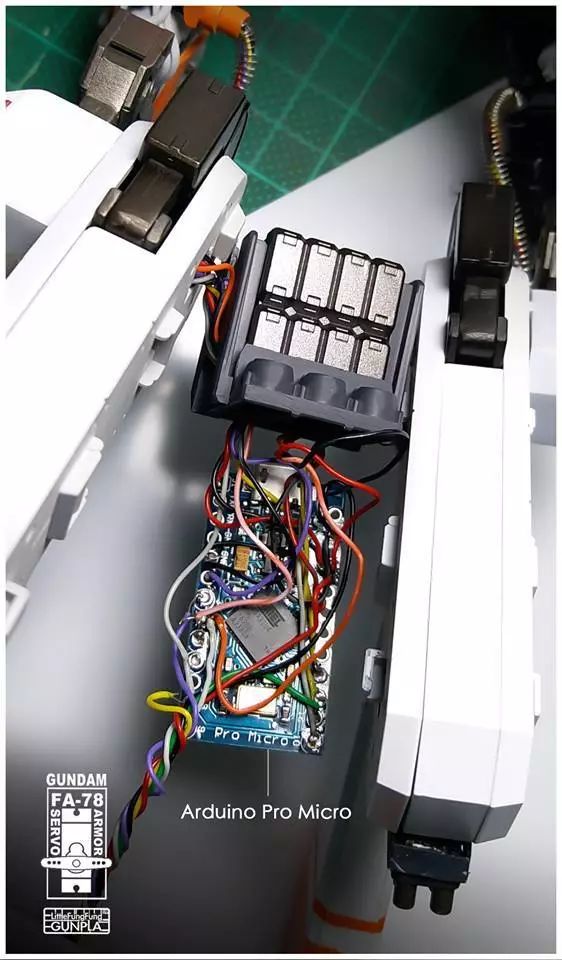
Arduino micro pro
! 留意! 上載編碼時板子最好不要插上任何LED或周邊設備
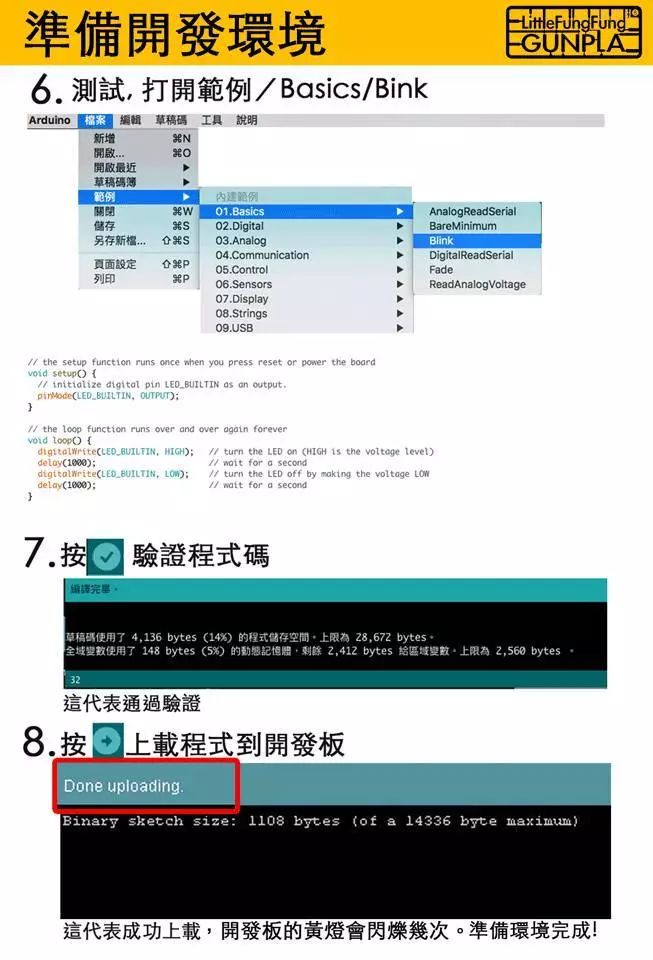
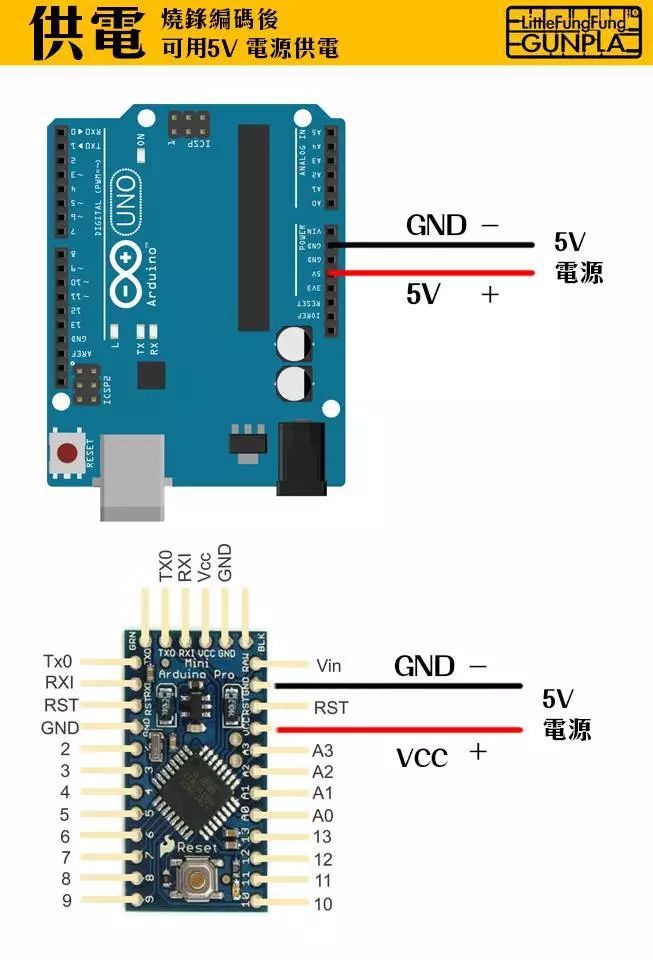
! 留意!
ARDUINO 用的是C++ 編碼,當中主要會有
void setup() {
void loop() {
所以如果要把網上得到的編碼混合使用,void setup()的CODE要放回void setup(),void loop() 的CODE要放回void loop(),其他變數和載入周邊設備的CODE就要 放在void setup()之前。
//CODE:
int led = 13;
void setup() {
pinMode(led, OUTPUT);
}
void loop() {
digitalWrite(led, HIGH);
delay(1000);
digitalWrite(led, LOW);
delay(1000);
}

! 留意!
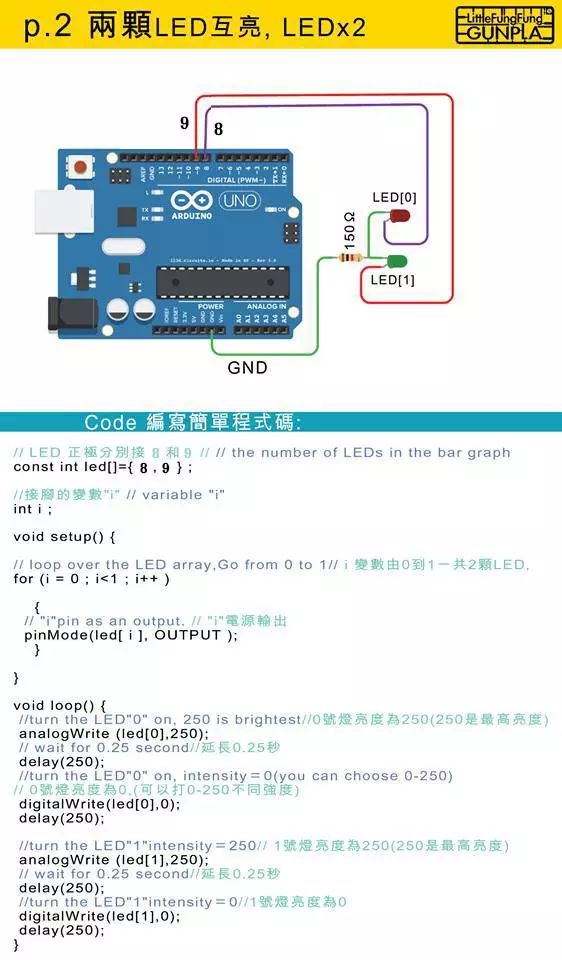
const int led[]={8,9} ;
編碼會安先後把接腳8變成led[0]
接腳9變成led[1]
所以如果你把接腳加上去
const int led[]={8,9,10,11,12} ;
就會變成
接腳8=led[0]
接腳9=led[1]
接腳10=led[2]
接腳11=led[3]
接腳12=led[4]
而void setup() {內的
for (i = 0 ; i
也要改成4顆LED
for (i = 0 ; i
//CODE:
const int led[]={8,9} ;
int i ;
void setup() {
for (i = 0 ; i
{
pinMode(led[ i ], OUTPUT );
}
}
void loop() {
analogWrite (led[0],250);
delay(250);
digitalWrite(led[0],0);
delay(250);
analogWrite (led[1],250);
delay(250);
digitalWrite(led[1],0);
delay(250);
}
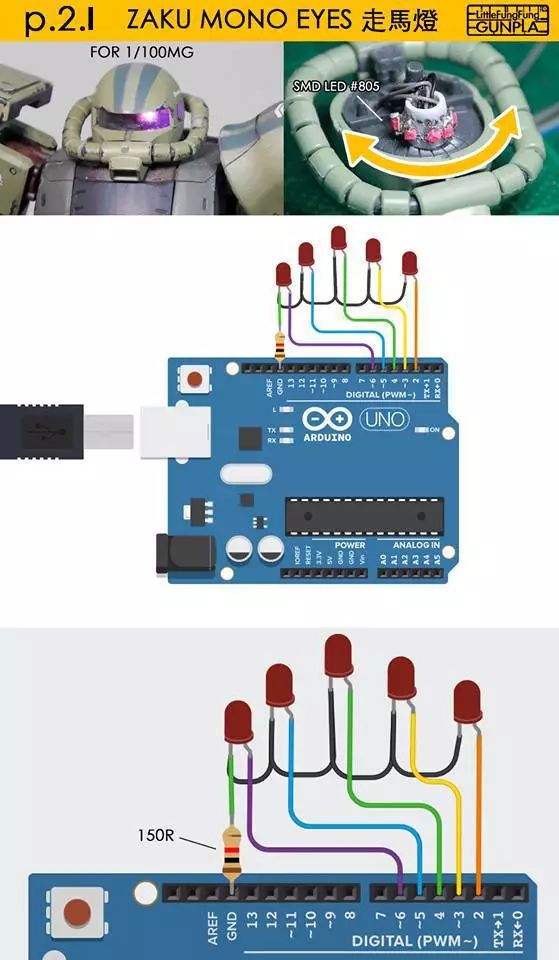
///CODE
const int ledpin[]={2,3,4,5,6} ;////LED+線接2,3,4,5
int eyesrun ;
int eyesmove;
int speed=100;////轉動速度
int lightness=250;////亮度
int center_eye_delay=5000;////中間眼的停頓時間
int L_eye_delay=1000;///最左眼的停頓時間
int R_eye_delay=2000;///最右眼的停頓時間
void setup() {
for (eyesrun = 0 ; eyesrun
{
pinMode(ledpin[ eyesrun ], OUTPUT );
}
}
void loop() {
for (eyesmove= 0 ; eyesmove
analogWrite (ledpin[eyesmove],lightness);
if (eyesmove==2){
delay(center_eye_delay);
}
else if(eyesmove==0){
delay(R_eye_delay);
}
else
delay(speed);
analogWrite (ledpin[eyesmove],0);
}
for (eyesmove= 4 ; eyesmove>0 ; eyesmove– ){
analogWrite (ledpin[eyesmove],lightness);
if(eyesmove==4){
delay(L_eye_delay);
}
else
delay(speed);
analogWrite (ledpin[eyesmove],0);
}
}
1:100 MG ZAKUII Var2.0
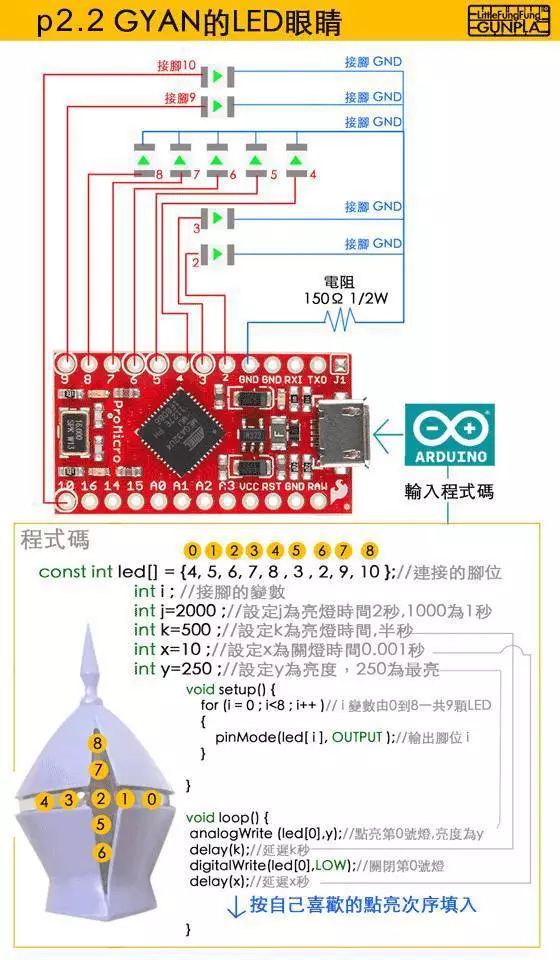
//CODE
const int led[] = {4, 5, 6, 7, 8 , 3 , 2, 9, 10 };
int i ;
int j=2000 ;
int k=500 ;
int x=10 ;
int y=250 ;
void setup() {
for (i = 0 ; i
{
pinMode(led[ i ], OUTPUT );
}
}
void loop() {
analogWrite (led[0],y);
delay(k);
digitalWrite(led[0],LOW);
delay(x);
analogWrite (led[1],y);
delay(k);
digitalWrite(led[1],LOW);
delay(x);
analogWrite (led[2],y);
delay(j);
digitalWrite(led[2],LOW);
delay(x);
analogWrite (led[3],y);
delay(k);
digitalWrite(led[3],LOW);
delay(x);
analogWrite (led[4],y);
delay(j);
digitalWrite(led[4],LOW);
delay(x);
analogWrite (led[3],y);
delay(k);
digitalWrite(led[3],LOW);
delay(x);
analogWrite (led[2],y);
delay(k);
digitalWrite(led[2],LOW);
delay(x);
analogWrite (led[5],y);
delay(k);
digitalWrite(led[5],LOW);
delay(x);
analogWrite (led[6],y);
delay(k);
digitalWrite(led[6],LOW);
delay(x);
analogWrite (led[5],y);
delay(k);
digitalWrite(led[5],LOW);
delay(x);
analogWrite (led[2],y);
delay(j);
digitalWrite(led[2],LOW);
delay(x);
analogWrite (led[7],y);
delay(k);
digitalWrite(led[7],LOW);
delay(x);
analogWrite (led[8],y);
delay(j);
digitalWrite(led[8],LOW);
delay(x);
analogWrite (led[7],y);
delay(k);
digitalWrite(led[7],LOW);
delay(x);
analogWrite (led[2],y);
delay(j);
digitalWrite(led[2],LOW);
delay(x);
analogWrite (led[1],y);
delay(k);
digitalWrite(led[1],LOW);
delay(x);
}
! 留意!
您可以先用
int x=???;
int y=???;
int z =???;
去預設多個角度,
這樣做的好處是日後修改也只需改變x,y,z的數值就可以了,甚至可以加入數式x-10,x+20的簡單算數去改變角度。
//CODE:
#include
Servo myservo;
int x=0;
int y=90;
int z=180;
void setup() {
myservo.attach(13);
}
void loop() {
myservo.write(x);
delay(1000);
myservo.write(y);
delay(1000);
myservo.write(z);
delay(1000);
}

//CODE:
#include
Servo myservo;
void setup() {
myservo.attach(0);
}
void loop() {
myservo.write(x);
delay(1000);
}
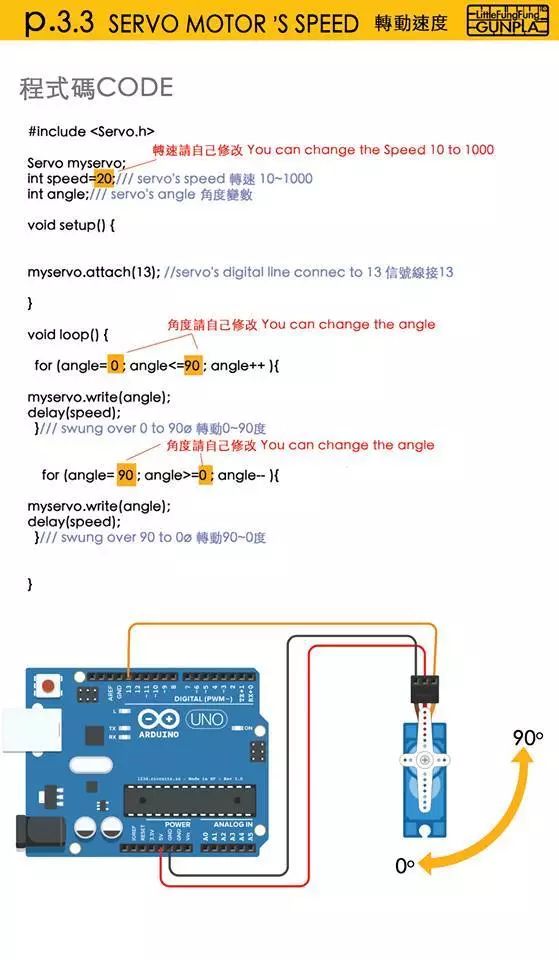
//CODE:
#include
Servo myservo;
int speed=20;
int angle;
void setup() {
myservo.attach(13);
}
void loop() {
for (angle= 0 ; angle
myservo.write(angle);
delay(speed);
}
for (angle= 90 ; angle>=0 ; angle– ){
myservo.write(angle);
delay(speed);
}
}
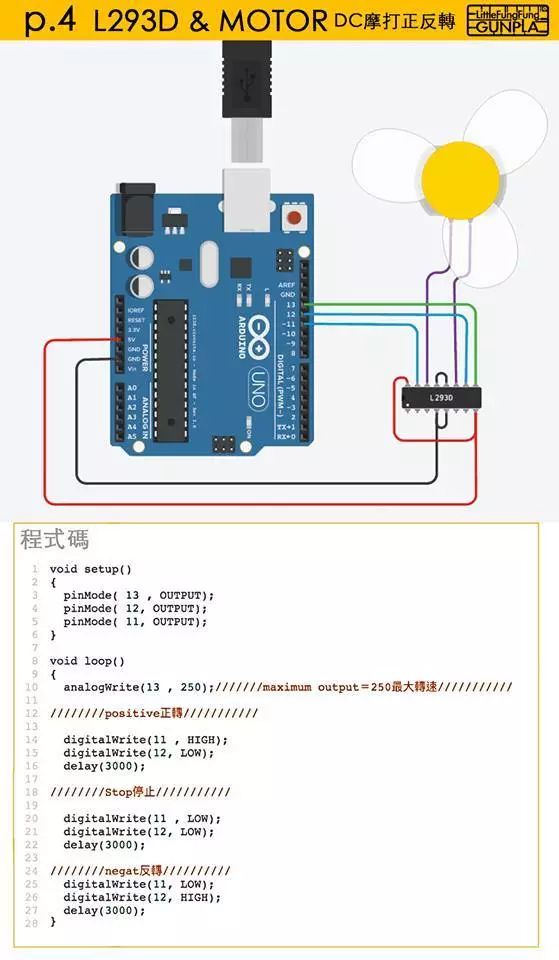
//CODE:
void setup()
{
pinMode( 13 , OUTPUT);
pinMode( 12, OUTPUT);
pinMode( 11, OUTPUT);
}
void loop()
{
analogWrite(13 , 250);
digitalWrite(11 , HIGH);
digitalWrite(12, LOW);
delay(3000);
digitalWrite(11 , LOW);
digitalWrite(12, LOW);
delay(3000);
digitalWrite(11, LOW);
digitalWrite(12, HIGH);
delay(3000);
digitalWrite(11 , LOW);
digitalWrite(12, LOW);
delay(3000);
}

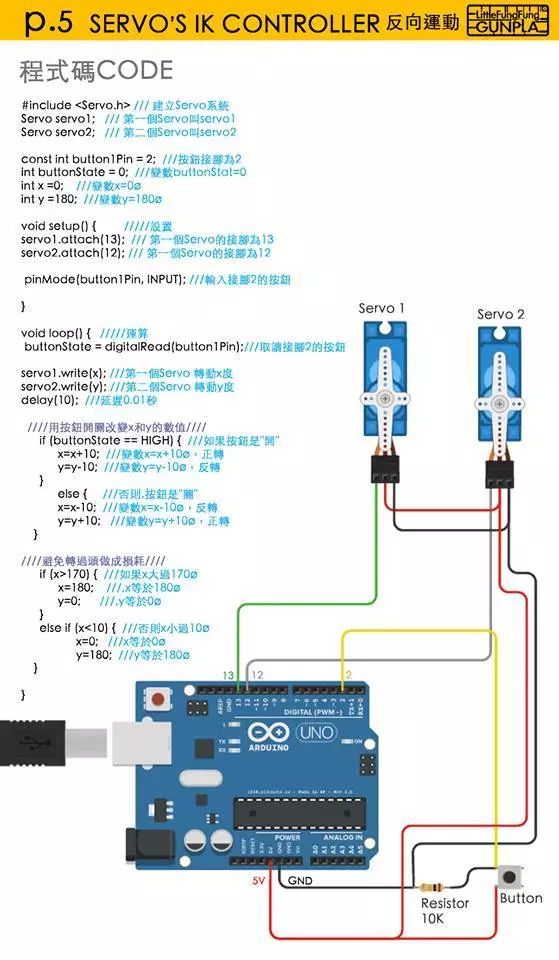
//CODE:
#include
Servo servo1;
Servo servo2;
const int button1Pin = 2;
int buttonState = 0;
int x =0;
int y =180;
void setup() {
servo1.attach(13);
servo2.attach(12);
pinMode(button1Pin, INPUT);
}
void loop() {
buttonState = digitalRead(button1Pin);
servo1.write(x);
servo2.write(y);
delay(10);
if (buttonState == HIGH) {
x=x+10;
y=y-10;
}
else {
x=x-10;
y=y+10;
}
if (x>170) {
x=180;
y=0;
}
else if (x
x=0;
y=180;
}
}
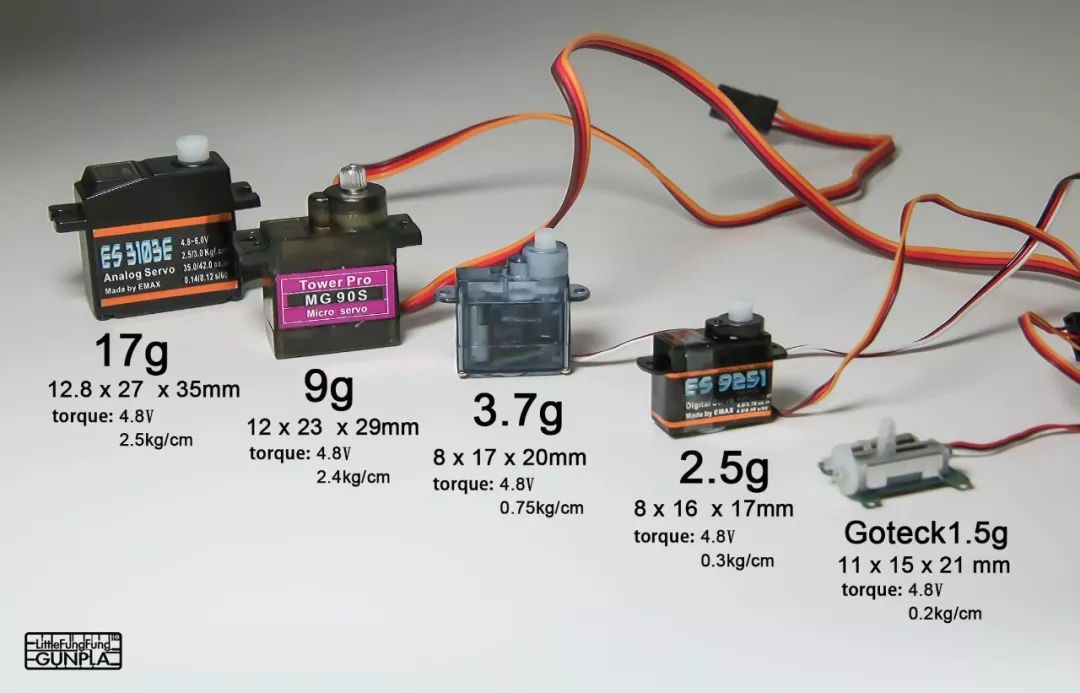
用mini就可整個板子收藏。

//GOTECK 1.5g
//CODE:
#include
Servo myservo;
int x=20;
int y=90;
int z=160;
void setup() {
myservo.attach(13);
}
void loop() {
myservo.write(x);
delay(1000);
myservo.write(y);
delay(1000);
myservo.write(z);
delay(1000);
}
編碼的”HIGH”和”LOW”除了供電給LED也可供電給其他的雜成IC
要留意的是,摩打越大動力越大,摩打越小動力也相對小。

用不同顏色的電線方便記認。
廣告
原創文章聲明
微信公眾號《高達模型製作技巧》自創辦以來深受各個方面大力支持,眾多作者編輯譯者亦傾力付出辛苦的汗水和獨特的創意。 對本工作號原創文章的轉載請聯繫公眾號編輯獲得授權。 私自轉載行為和任何不負責的摘錄行為,本公眾號運營主體將進行最大程度的追責。
返回好心遊戲,查看更多
本文標籤: 模玩
為您準備的好內容:
http://www.haoxyx.com/gamehtml/99897991/218593984.html
www.haoxyx.com
true
http://www.haoxyx.com/gamehtml/99897991/218593984.html
report
17276
原標題:【教程】手把手教你,讓你的模型動起來認真學習本教程,可以讓你的高達動起來。 配合先前發布的兩篇教程:高達模型就可以上戰場了! 代碼部分為代碼下方配圖中的代碼,請注意區分。 軟件下載:在圖中已寫鵲匕Arduinomicropro! 留意! 上載編碼時板子最好不要插上任何LED或周邊設備! 留意! ARDUINO用的是C++編碼,當中主要會有voidsetup(){voidloop(){